Self-driving cars and Localization
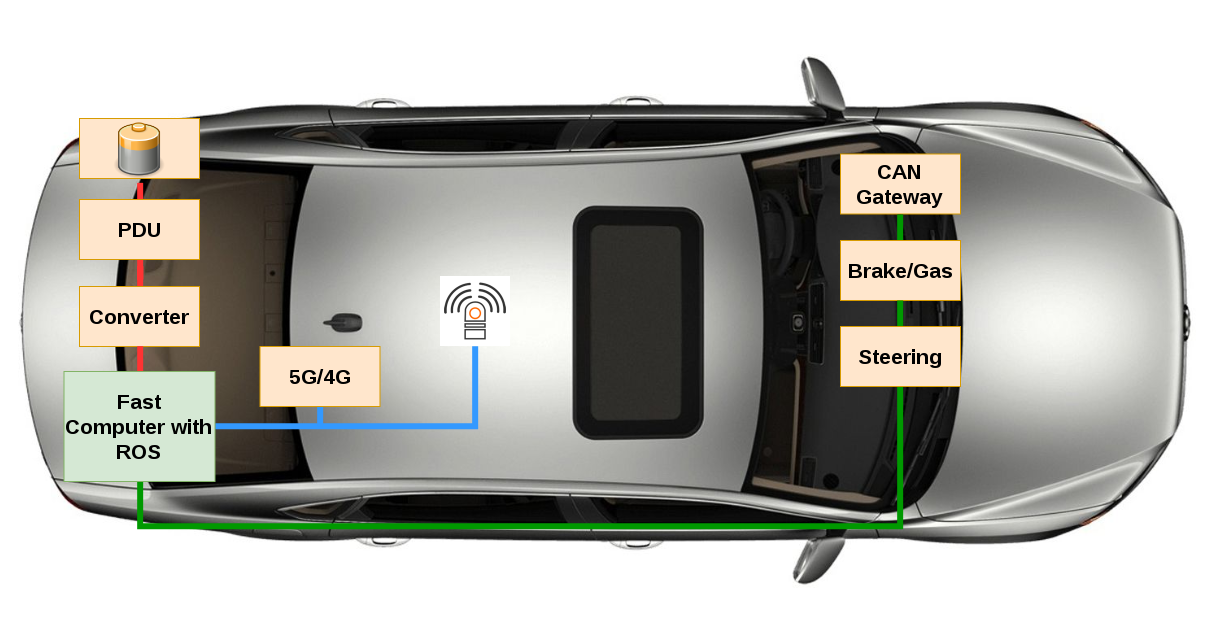
In this article, I’m going to describe a possible scenario for the precise positioning of autonomous cars in the streets and intersections. Overview Before describing the localization of autonomous cars, I want to describe some important components which may be used in the next generation of autos. Basically, there are two vital elements for driving