Definition of Perspective Projection, Perspective Space & Projective Geometry
I decided to write some short articles about projective geometry, and so these basics will give you not only some insight into the basics of stereo image processing but also help you understand linear transformations better.
After reading this article you should be familiar with:
- Perspective Projection
- Perspective Space
- Projective Geometry
and you should not mix them up!
Perspective Projection, Perspective Space and Projective Geometry
To get some idea and sense about these three phrases, we need to define three important elements:
-
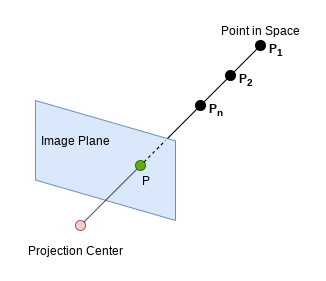
Projection Center/Point. It is a point where light arrays will travel toward a point on the space or surface of an object.
-
Image Plane (or perspective plane which can be considered as an affine plane) is a plane which will be placed before or after the projection center and so the points on the space can be projected on it.
-
Point in 3D space
These basic elements will be used to describe the perspective projection, perspective space, and projective geometry. Now We will start with Perspective Projection which basically is the projection of 3D scene on a 2D plane and roughly say, it is taking a photo from the 3D world. To do that consider a point in space and connect this point to the center of projection. The line (light array) will collide with the image plane(or perspective plane) at a single point. This point (on image plane) is basically the projection/image of the point on the space (the point can be located on the surface of an object). If you move the point along the line, you will notice that independent of the location of the point along the line, the projection of that point is just a single point on the image plane(or perspective plane), see figure below.
In perspective projection, one dimension will be eliminated and it is depth information. But how can we describe this projection using mathematics? The answer is simple, using Projective Space which somehow can be considered as an extension of affine space. The difference is though that for two parallel lines there would be two points at infinity at each end of lines which are called vanishing point (or ideal point), and so in comparison affine space, projective space would have more points. The following figure shows the affine space.
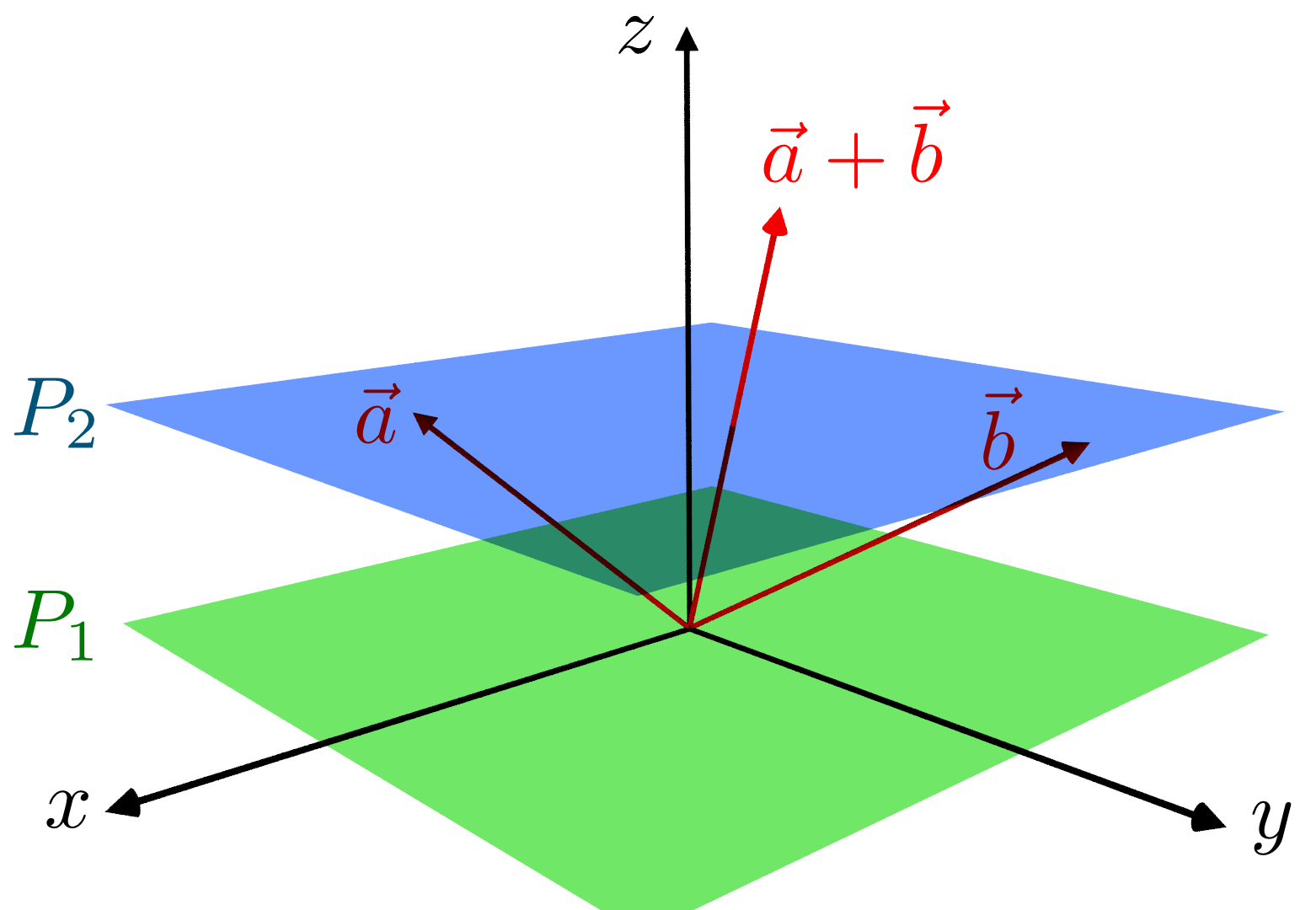
As we can see this space contains 3D Euclidean space which contains P1 and has an origin, and a plane P2 where the projection of 3D space will be created which does not have the origin and can be considered as projection plane.
Last but not least is Projective Geometry which is basically a set of projective space and some geometric elements to study the invariant parameters in a homography (or projective transformation) which I will write about them next articles.
Summary
In this short article, we got familiar with Perspective projection, Projective Space and Projective Geometry and in the next articles, we will work more on projective space and linear transformations which are important basics to dive deeper into other (stereo) image processing topics such as camera calibration, Epipolar geometry, etc.
Continue Reading: Projective Geometry
Last post: Local Feature and Harris Corner Detection


About The Author
Tech Enthusiast